Automatic Sensor Based Wall Painting Robot Ppt
Https Zenodo Org Record 269655 Files Paper 6 20 20issue 1 20 20engg 20full 20paper 20page 2049 56 20 20vani 20mukundan 20sirajudeen 20jan 2017 Pdf

Pdf Automatic Robotic Spray Painting Of Low Volume High Variant Parts
Http Www Allsubjectjournal Com Download 685 46 Pdf
Http Ijariie Com Adminuploadpdf Automatic Wall Painting Robot Ijariie5422 Pdf

Automatic Room Lights Using Arduino And Pir Sensor Cctv Security Systems Arduino Home Automation Room Lights

Pdf Design Of An Autonomous Wall Painting Robot

These reasons makes us to develop automatic wall painting robot.
Automatic sensor based wall painting robot ppt.
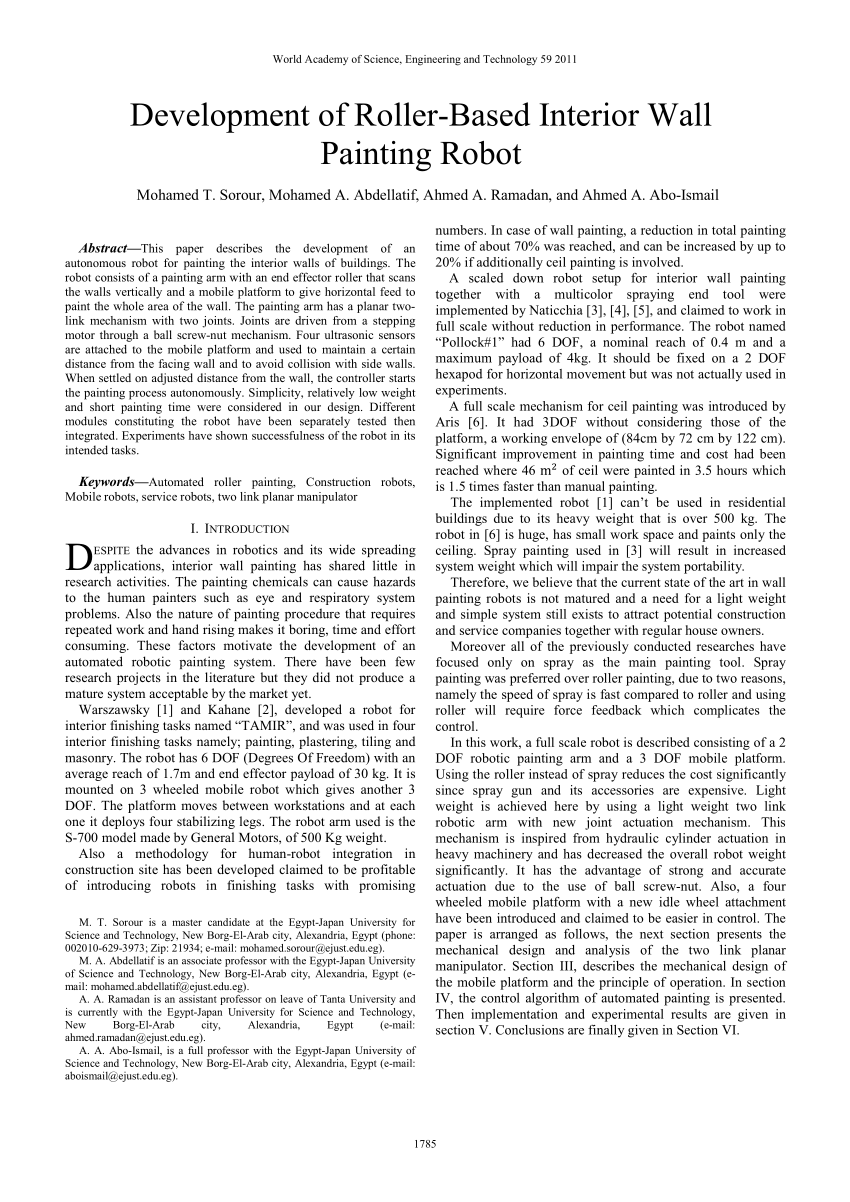
Pdf Development Of Roller Based Interior Wall Painting Robot

Arduino Based Automatic Plant Irrigation System With Message Alert Irrigation System Irrigation Diy Irrigation

Pir Motion Sensor Light Switch Is Designed Using The Arduino To Deter The Thief Motion Sensor Pir L Motion Sensor Lights Motion Sensor Simple Arduino Projects

Arduino Based Floor Cleaning Robot Using Ultrasonic Sensor Cleaning Robot Electronics Projects Arduino
Http Www Ijtrd Com Papers Ijtrd7842 Pdf
Https Www Ijert Org Research System Design Considerations For Autonomous Wall Painting Robot Ijertv2is100556 Pdf

Creative Robot Art Shows Light Bulb Plugging Itself In Techeblog Lamp Light Bulb Bulb

Creative Robot Art Shows Light Bulb Plugging Itself In Techeblog Lamp Light Bulb Bulb

Ultrasonic Distance Sensor In Arduino With Tinkercad Arduino Sensor Ultrasonic
Robotics Projects For Engineering Students Electronicshub Org
100 Robotics Projects For Final Year Engineering Students

Industry 4 0 Sensors Poster Map Map Screenshot Poster

In Today 39 S Tutorial I Am Going To Share A New Proteus Library Named As Flex Sensor Library For Proteus I Am Quite Excited While Flex Sensor Library

Automatic Door Opening System Using 8051 Microcontroller Automatic Door Automatic Door Opener Electronic Circuit Projects

Home Automation System Using Gsm And Arduino Block Diagram

Arduino Uno Blueprint Poster Free Download Produced By Elektor For Element14 You Arduino Arduino Projects Arduino Programming
Plc Program For Automatic Mixing Controlling In A Tank In 2020 Ladder Logic Plc Programming Problem And Solution

Oil Separating Machine Mechanical Final Year Project Youtube Oils Mechanic Projects
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcsezriqfmtjgytrh29xzwvi5jkgugslxibzu5dibqq Usqp Cau

Penxzyl 3 1 Arduino Brush Plotter New And Improved Cnc Hackster Io In 2020 Electronic Circuit Projects Arduino Projects Arduino

Ganesh Paintings Ganesh Art Hindu Art Ganesha Painting Hindu Art Ganesha Art

Painted Pressure Sensor

The Most Disruptive Technologies Disruptivetechnology Blockchaintechnology Blockchaindevelopers Tgit Thursdaythoughts

Pin Na Doske Malinka
Source : pinterest.com
